Short-mission at Politecnico di Milano
The activities performed by the young researcher during his stay at the Artificial Intelligence and Robotics Laboratory (AIRLab) of Politecnico di Milano focused on the development of a sensor fusion algorithm to track the 3D position of an Unmanned Aeria Veihicle leveraging on the ranging capabilities of a radar sensor and the detection capabilities of a vision system.
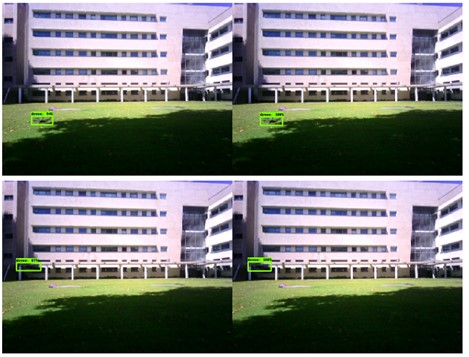
At his arrival, the researcher had already collected a dataset capturing the flight of a drone from a radar and a camera system. Ground truth for the pose of the drone was available from an accurate lidar tracking it. A Kalman filter was also available to fuse the radar and camera measurement providing a 2D image plane tracking and a depth estimate. Together with the AIRLab team, the researcher first developed a fully 3D tracking system, based on an Extended version of the Kalman filter, able to track the drone in real-time; due to the noisy nature of the measurement, mechanisms for measurement outlier rejection have been implemented increasing the robustness of the filter.
Once a first prototype was available, the researchers improved its performance under different perspectives. In order to deal with the asynchronous nature of the measurement streams provided by the radar and the camera, an asynchronous version of the Extendend Kalman filter has been developed and tested. This makes it possible to deal with asynchronous sensors, but also to update the estimate of the drone position as soon as a measurement is available. Also, the problem of depth initialization from pure vision measurement has been improved; the estimated size of the drone has indeed been used as prior. Finally different strategies have been investigated to deal with multiple returns from the radar referring to the same object. The tracker has been implemented using ROS and it is capable of running at real-time frequency triggered by arrival of measurements.